
D. Aredesa*, M. C. Torrijosb, E. Vaioa y M. Mineoa
aCentro de Investigaciones Ópticas, CP 1897, Gonnet, Argentina, aredesd@ciop.unlp.edu.ar
bConsejo Nacional de Investigaciones Científicas y Técnicas (CONICET) – Laboratorio de Entrenamiento Multidisciplinario para la Investigación Tecnológica (LEMIT), CP 1900, La Plata, Argentina, mc.torrijos@conicet.gov.ar
*Autor de correspondencia
Recibido: 19 de septiembre de 2025
Aceptado: 29 de enero de 2026
RESUMEN
Deficiencias en el diseño, la construcción, los materiales, la falta de mantenimiento apropiado o la sobresolicitación de una estructura de hormigón pueden acortar su vida útil al comprometer la funcionalidad y/o la seguridad de la misma, con las consecuencias que ello conlleva. Así, por ejemplo, el deterioro de ciertas estructuras, como plantas de energía nuclear, puentes, presas y edificios, puede provocar riesgos elevados para la seguridad de las personas y del medio ambiente. En estos casos el monitoreo estructural juega un rol fundamental. A pesar de su importancia, el monitoreo estructural todavía no está suficientemente extendido en nuestro país, generalmente motivado por los costos involucrados en las inspecciones puntuales o la instalación de sistemas de monitoreo continuo. Por ello, el desarrollo de sensores asequibles resulta un avance crucial para el sector de la construcción y el manejo inteligente de recursos. En este trabajo se muestran estudios preliminares para el diseño de un sensor de fibra óptica (FO) para medir deformaciones en una estructura de hormigón.
PALABRAS CLAVE: Monitoreo estructural, fibra óptica, fibra de redes de Bragg
ABSTRACT
Deficiencies in design, construction, materials, lack of proper maintenance, or overload of the concrete structure can shorten its useful life by compromising the functionality and/or safety of the structure, with the resulting consequences. For example, the deterioration of certain structures, such as nuclear power plants, bridges, dams, and buildings, can cause high risks to the safety of people and the environment. In these cases, structural monitoring plays a very important role. Despite its importance, structural monitoring is still not sufficiently widespread in our country, generally due to the costs involved in inspections or the installation of continuous monitoring systems. Therefore, the development of affordable sensors is a crucial advance for the construction sector and the intelligent management of resources. This paper presents preliminary studies for the design of an optic fiber (OF) sensor for measuring deformations in a concrete structure.
KEYWORDS: Structural monitoring, optic fiber, fiber Bragg grating
- Introducción
El monitoreo estructural tanto a corto como a largo plazo es importante fundamentalmente en obras como plantas de energía, túneles, presas, oleoductos y edificios, cuyo deterioro puede provocar riesgos elevados para la seguridad de las personas y del medio ambiente. Además, puede traer aparejado ventajas económicas ya que la detección temprana de signos de deterioro reduce los costos de reparación y/o reemplazo y además alarga la vida útil de la estructura.
La instalación de sistemas de monitoreo durante la fase de construcción permite que el monitoreo se lleve a cabo durante toda la vida útil de la estructura. Dado que la mayoría de las estructuras tienen que ser inspeccionadas varias veces durante el servicio, la mejor manera de disminuir los costos de monitoreo e inspección es instalar el sistema de monitoreo durante la construcción o rehabilitación de las mismas. La instrumentación de estructuras durante su construcción puede ser también una valiosa herramienta para validar métodos de construcción sofisticados o nuevos materiales.
Un sensor óptico es un dispositivo electrónico que detecta luz (visible o infrarroja) y la convierte en una señal eléctrica para medir, detectar presencia, posición o características de objetos sin contacto físico. Entre las ventajas de utilizar sensores ópticos, en este caso redes de Bragg grabadas en fibra óptica figuran: reducido peso y tamaño, posibilidad de sensado remoto, tiene una gran compatibilidad con una amplia variedad de materiales [1], poseen inmunidad a interferencias electromagnéticas (lo que permite su instalación en redes de alta tensión o centrales de generación eléctrica), pueden operar en ambientes corrosivos o con riesgo de explosión (tuberías de gas o petróleo, reactores nucleares, etc.). Además, ofrecen la posibilidad de multiplexado de un gran número de sensores en una misma fibra, simplificando de esta forma la instalación y posterior monitoreo utilizando un único sistema interrogador, a la vez de reducir el cableado necesario en comparación con los sensores eléctricos convencionales [2]. También, por tratarse de sensores absolutos, una vez instalados en la estructura no necesitan ser calibrados nuevamente en ninguna circunstancia y todas las mediciones realizadas pueden ser contrastadas con la condición inicial de la estructura al momento de su entrada en servicio. Esta característica es de vital importancia cuando se necesita evaluar cambios graduales que ocurren a lo largo de muchos años [3].
El tipo de fibra óptica debe ser lo suficientemente sensible para detectar de manera confiable fisuras y al mismo tiempo tener cierta flexibilidad para evitar la rotura de la fibra cuando éstas se forman; especialmente cuando se utiliza en sitios de construcción que requieren cierta robustez [4]. Para garantizar la fiabilidad en el seguimiento a largo plazo, también se imponen requisitos sobre la durabilidad.
El objetivo de este trabajo es diseñar un sensor óptico para ser utilizado en estructuras de hormigón. En primer lugar y teniendo en cuenta consideraciones teóricas se fabricaron los sensores y luego se realizaron pruebas a escala de laboratorio con lo sensores embebidos en elementos de hormigón para contrastar las mediciones con sensores electromecánicos y realizar los ajustes necesarios. Este desarrollo permitirá la oferta de una tecnología competitiva, asequible y adaptada a los condicionantes locales, para mejorar la seguridad y durabilidad de las estructuras de hormigón armado.
1.1 Sensores de fibras ópticas
1.1.1 Descripción de los elementos sensibles (FBG)
Las fibras ópticas estándar (FO) para comunicaciones, utilizadas en la grabación de sensores tipo redes de Bragg (FBG – Fibre Bragg Grating), están diseñadas con precisión para maximizar la transmisión de luz a través de la misma. Los sensores tipo FBG aprovechan las propiedades únicas de una sucesión de franjas de levemente diferente índice de refracción creadas en el núcleo de la FO para reflejar una longitud de onda angosta al ser iluminadas por una fuente de luz de banda ancha [5,6]. Estas redes, a su vez, responden a cambios en variables físicas como temperatura o deformación, alterando la longitud de onda de la luz que se refleja en ellas. La longitud de onda reflejada por la FBG es función de la diferencia de índice de refracción entre las franjas que la conforman y el propio de la FO, la cual es a su vez dependiente de la temperatura a la que se encuentra sometida la misma. Asimismo, dicha longitud de onda también es afectada por el período entre las franjas que componen la FBG, por lo tanto, esta puede ser modificada deformando axialmente la FO [7]. Estos comportamientos pueden utilizarse mediante el apropiado diseño de un montaje transductor para medir temperaturas y/o deformaciones en estructuras. Si bien el objetivo del presente trabajo es la medición de deformaciones, debe tenerse en cuenta que debido a la forma en que una FBG es afectada por variaciones térmicas, cualquier sensor basado en una FBG mide únicamente variaciones térmicas o variaciones térmicas y deformación, pero nunca podrá medir sólo deformación. Para desafectar la medición de deformación de la medición total (temperatura + deformación) provista por el sensor, es necesario conocer la temperatura de la estructura [8].
Las fibras ópticas son por naturaleza muy frágiles, por lo que cuentan con diferentes capas de protección mecánica para hacerlas utilizables en diferentes ambientes de trabajo. La primera capa de protección se denomina recubrimiento y su principal función es otorgarle a la FO resistencia a la flexión. El material del recubrimiento es usualmente acrilato, poliimida o metal. El primero se comporta como la vaina de un cable sin estar adherido a la FO y posee usualmente un espesor de unos 60 µm. La poliimida y el recubrimiento metálico son depósitos sobre la superficie de la FO por lo que se encuentran adheridos a la misma. Los recubrimientos metálicos no son muy comunes y suelen utilizarse en aplicaciones donde la FO se encontrará sometida a muy altas temperaturas. El recubrimiento de poliimida posee una resistencia térmica mayor al acrilato y un espesor de aproximadamente 15 µm. Además de esto, una característica muy importante de este recubrimiento para su uso en sensores de deformación es que al estar adherido a la FO tiene la capacidad de transmitir los esfuerzos a la misma evitando la necesidad de remover el recubrimiento en la zona sensible de la FO.
1.1.2 Consideraciones para la interfaz elemento sensible-transductor
Debe tenerse en cuenta que la sujeción de la FO al montaje puede realizarse directamente sobre la fibra sin recubrimiento o manteniendo el recubrimiento primario de la misma. El primer caso tiene la ventaja de que las deformaciones se transmitirán de manera más directa a la parte de la FO que contiene la FBG siendo más precisa en sus mediciones, pero también presenta una mayor dificultad en la fabricación de los sensores al dejar a la FO en una condición de extrema fragilidad por exponer una zona de la misma ya debilitada por el grabado de la FBG. En el segundo caso el riesgo de rotura de la FO durante la fabricación de los sensores se reduce sustancialmente, pero, dependiendo del recubrimiento que posea la FO y de la longitud de la misma que se planee sujetar, la atenuación y/o deslizamiento de la FO respecto del recubrimiento puede hacer que esta forma de sujeción no sea apropiada para el desempeño buscado. Un recubrimiento de acrilato se comporta como una vaina de un cable con poca adherencia a la superficie exterior de la FO, por lo que la sujeción sobre este recubrimiento de la FO no es recomendable cuando la longitud de sujeción es acotada. El recubrimiento de poliimida, en cambio, se comporta de manera similar a un depósito sobre la superficie de la FO y posee una gran adherencia a la misma por lo que no se produce deslizamiento entre ésta y el recubrimiento. Asimismo, al ser el espesor del recubrimiento muy delgado, la atenuación en la transmisión de la deformación debido a la deformación propia del recubrimiento es mínima.
La naturaleza frágil del cristal de silicio hace que las concentraciones de tensiones en zonas acotadas como las producidas por una sujeción mecánica por compresión de la FO al montaje sean posibles puntos de rotura y también pueden producir efectos no deseados en la transmisión de la luz a lo largo de la misma. Este método de sujeción es prácticamente inaplicable en el caso de la fibra sin recubrir y en la mayoría de los casos produce daños al recubrimiento cuando se aplica sobre éste. La interfaz más efectiva entre la fibra óptica y el montaje es en cualquier caso el pegado ya que dicho método de sujeción no produce daño alguno en la FO como sí es el caso de la sujeción mecánica. Esta forma de sujeción puede realizarse tanto con la fibra sin recubrimiento como con cualquiera de los recubrimientos descriptos anteriormente. Es importante seleccionar apropiadamente el adhesivo a utilizar por razones pertinentes tanto al proceso de fabricación del sensor como al desempeño del mismo. Es importante destacar que el adhesivo se deformará al transmitir la deformación del montaje a la FO, constituyendo de esta manera otra fuente de atenuación.
1.1.3 Consideraciones para la interfaz transductor-hormigón
A diferencia de los sensores diseñados para ser colocados en estructuras preexistentes, donde indefectiblemente existe un elemento que actúa como interfaz de sujeción mecánica entre el mismo y la estructura a medir (adhesivo, remaches, soldadura), los sensores embebibles en la propia estructura carecen de dicho elemento, por lo que el diseño del montaje dependerá únicamente de la interacción de éste con el material de la estructura. En el caso del hormigón armado hay que tener en cuenta las siguientes características del mismo: durante el llenado de la estructura con hormigón el sensor estará en contacto con una mezcla de mayor o menor viscosidad y con la armadura, una vez que adquiera resistencia será el hormigón el que transmita los esfuerzos al montaje del sensor. No obstante, los agregados gruesos deben considerarse para evitar que produzcan daños al montaje y/o al cableado de FO durante el llenado de la misma. La armadura es una buena opción para usar como punto de sujeción de los sensores embebidos debido a que garantiza la posición de los mismos durante el llenado y también para la sujeción del cableado de fibra óptica para evitar el desplazamiento excesivo del mismo y las tensiones que ello generaría. El diseño del montaje del sensor debe realizarse con dos objetivos fundamentales: replicar la deformación de la estructura con la mayor verosimilitud y el menor error de inserción, y no interferir en el comportamiento de la estructura o disminuir de alguna forma sus prestaciones.
- Programa experimental
El programa experimental se dividió en dos etapas. Una primera etapa (Etapa 1) donde se desarrollaron los sensores de FO utilizando los conocimientos adquiridos en proyectos anteriores y adaptándolos a los requerimientos operacionales del presente. Se estudiaron las posibles formas de protección de la FO teniendo en cuenta el nuevo ambiente de utilización de los mismos y considerando tanto las condiciones de servicio como las de hormigonado de la estructura. A partir de ello se buscaron los materiales, adhesivos y el diseño que mejor cumplieran con los objetivos planteados en el proyecto. Esta etapa se culminó con la realización de ensayos de validación de los prototipos fabricados y el análisis de los resultados obtenidos mediante la contrastación con métodos de medición tradicionales.
Una segunda etapa (Etapa 2) consistió en modificar el diseño de los sensores en base a las conclusiones formuladas tras el análisis de los ensayos de la primera etapa para luego realizar nuevas pruebas de validación y su posterior análisis.
Las pruebas de validación en la Etapa 1 consistieron en ensayos de tracción del sensor de FO solo y luego ensayos de flexión con el sensor embebido en una probeta de hormigón. En la Etapa 2 la validación se realizó con el sensor embebido en probetas de hormigón ensayadas a flexión y a compresión. En ambas etapas se elaboró el mismo hormigón de razón a/c 0,46, con 315 kg/m3 de cemento portland normal y piedra partida granítica de tamaño máximo igual a 12 mm. Para los ensayos de flexión se moldearon probetas prismáticas de 60 cm de longitud con una sección de 15 cm x 15 cm con el sensor de FO embebido en ellas, para el ensayo de compresión el sensor fue colocado dentro de una probeta de 43 cm de longitud y sección igual a 7,5 cm x 10,5 cm. También se moldearon cilindros de 10 cm x 20 cm para caracterizar al hormigón en compresión, la resistencia a compresión fue igual a 43 MPa y el módulo de elasticidad igual a 44 GPa.
- Etapa 1
3.1 Diseño del sensor de fibra óptica
Teniendo presentes los objetivos antes mencionados se pensó en un montaje consistente en una barra perforada en su interior (Figura 1).
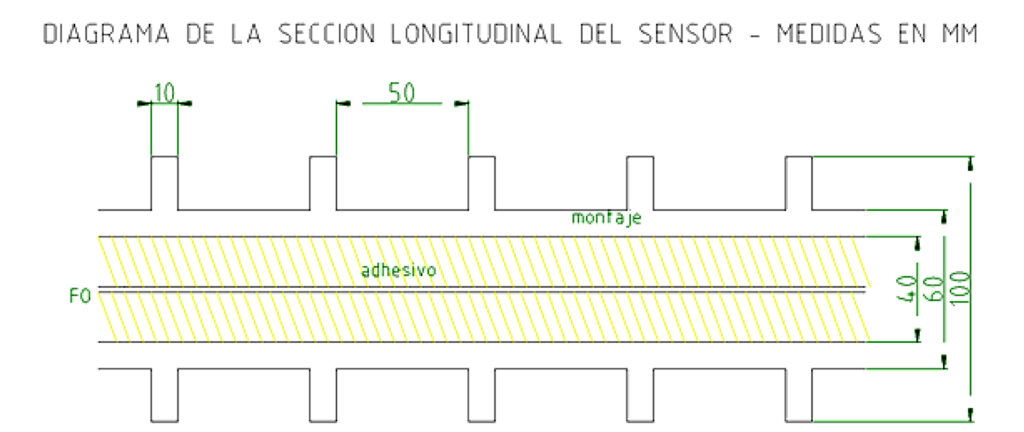
Se optó por un diseño del tipo vaina que proveyera una protección externa que otorgue a la fibra óptica protección mecánica y al adhesivo una protección al ataque químico del hormigón.
La vaina externa se fabricó a partir de una barra de acero AISI 1020, misma aleación utilizada en la armadura, agujereándola en su centro para alojar la fibra óptica y realizándole caladuras transversales a lo largo de su perímetro para proveer sujeción entre la misma y el hormigón. Se diseñó una vaina de 30 cm de largo para que tanto los empalmes entre los cables de fibra óptica con protección mecánica como el tramo de fibra que contiene a la FBG sin protección queden dentro de la misma, otorgándole de esta forma mayor robustez.
En este caso, debido a la necesidad de brindarle a la FO la mayor protección total y al mismo tiempo satisfacer la necesidad de transmitir a la FBG las deformaciones de tracción y compresión, se optó por un pegado completo de la misma con un adhesivo del tipo epoxi apto para trabajo en volumen y curado a alta temperatura. Esta elección permite posicionar la FO con precisión, rellenar con el adhesivo el espacio libre dentro de la vaina metálica que compone la cubierta exterior del sensor y como último paso curar el adhesivo minimizando posibles daños a la FO durante el proceso de armado. Al pegar al montaje la parte de la fibra que contiene a la FBG se produce una deformación del espectro reflejado de la misma, pero puede ser minimizada con un recocido posterior del sensor a baja temperatura y permite la medición de deformaciones de compresión, que de otra manera sólo podrían ser medidas sometiendo a la fibra óptica a un pretensado previo al pegado.
3.2 Ensayos mecánicos de contrastación realizados con sensores tradicionales
En primer lugar, se realizaron ensayos de tracción sobre el prototipo de FO y luego, ensayos de flexión en probetas de hormigón para contrastar el sensor óptico con sensores comerciales electromecánicos.
3.2.1 Ensayos de tracción sobre la FO
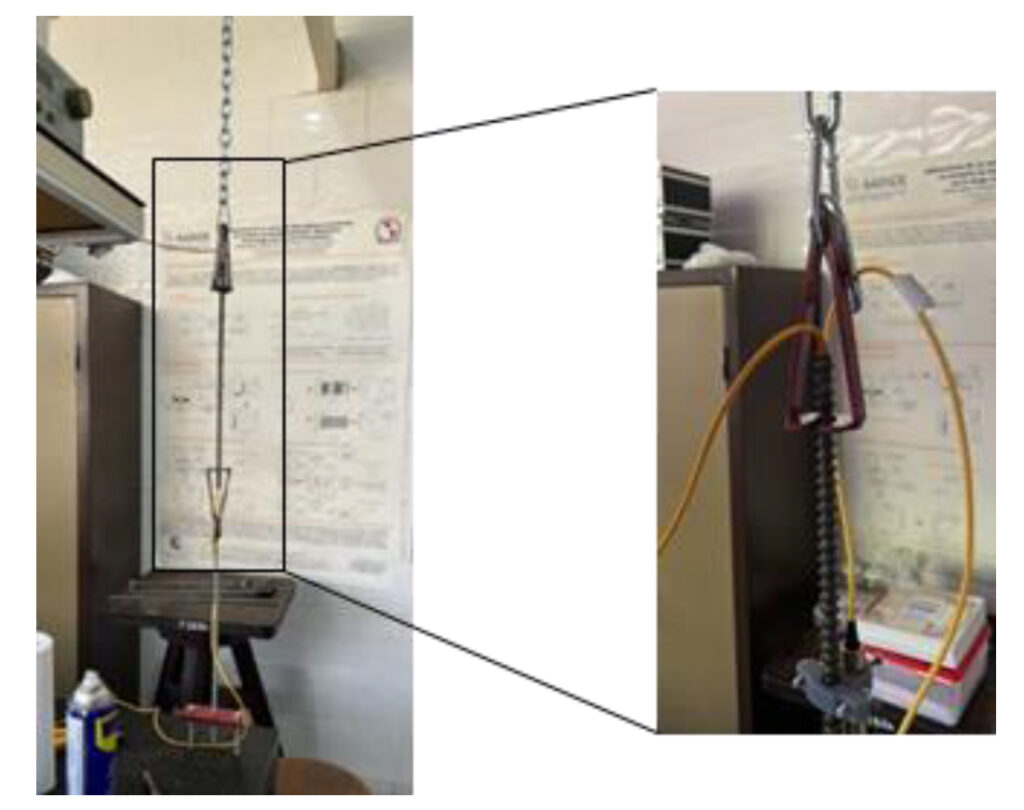
Se realizaron ensayos de tracción (Figura 2) sobre los dos prototipos de FO fabricados, sujetándolos a una viga del techo en uno de sus extremos y traccionándolos con un tornillo sujeto en el otro extremo a una mesa de óptica con un peso aproximado de unos 700 kg. Este ensayo se realizó para cuantificar la atenuación producida por el adhesivo y establecer la sensibilidad del mismo mediante la contrastación con una medición interferométrica del desplazamiento producido. Sin embargo, los resultados no fueron concluyentes ya que la rigidez de la vaina de acero del sensor hizo que la fuerza aplicada fuera insuficiente para deformarla significativamente y la deformación producida se distribuyera en los diferentes componentes del montaje de ensayo.
3.2.2 Ensayos de flexión con la FO embebida en el hormigón
Se planificaron dos ensayos de vigas de hormigón con los sensores embebidos en sendas probetas según muestra la Figura 3a.
El sensor de FO se ubicó en la cercanía de la cara inferior de la probeta (aproximadamente 2 cm), sujeto mediante alambre de obra a una barra de acero de armadura, para maximizar la deformación a la que sería sometido. Una vez moldeadas las probetas permanecieron 28 días en cámara húmeda. Se denominaron CIOp1 y CIOp2.
Los ensayos se realizaron con la carga a los tercios y una luz entre apoyos de 45 cm, produciendo de esta forma un estado de flexión pura en el tercio central de la misma. Ambos ensayos se realizaron a velocidad de carga constante controlada por la extensión. Se utilizó para contrastar la medición un sensor del tipo LVDT (Lineal Variable Differential Transducer) colocado externamente en la cara inferior de la probeta, con una base de medida igual a 35 cm para la probeta CIOp1 y de 38 cm para la probeta CIOp2 (ver Figura 3b).

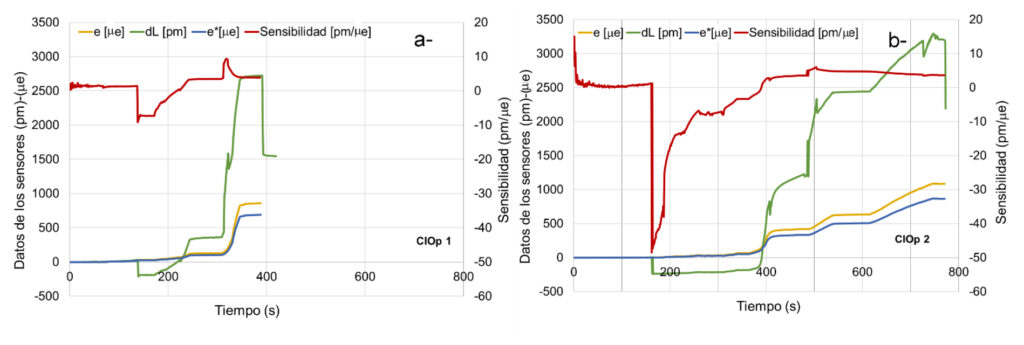
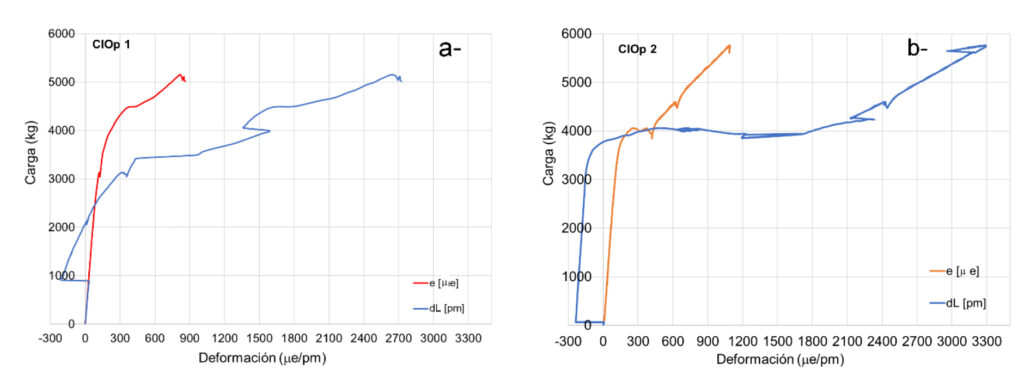
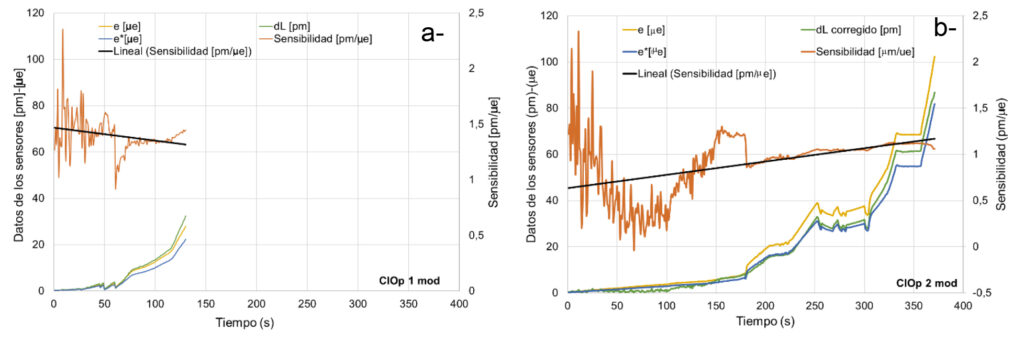
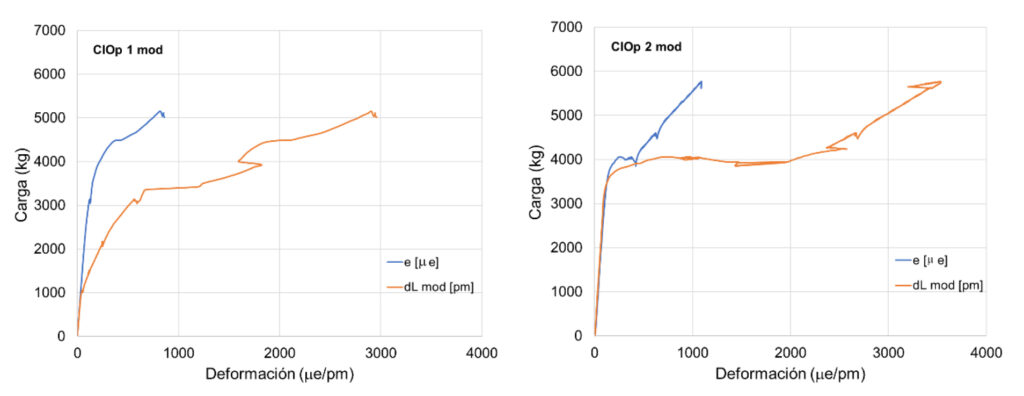
En la Figura 4 se presentan los gráficos obtenidos a partir de los ensayos de flexión, se grafican e (deformación específica medida por el sensor LVDT), e* (deformación específica medida por el sensor LVDT corregida por la ubicación del sensor óptico respecto de la cara inferior de la viga), dL (variación de la indicación de longitud de onda del sensor óptico debido a la deformación de la viga) y la sensibilidad del sensor óptico (cociente entre la variación de la longitud de onda del sensor óptico y la deformación específica corregida indicada por el sensor LVDT) en función del tiempo. Los datos obtenidos del sensor óptico mostraron un comportamiento comparable al del sensor LVDT con eventos anómalos a partir de cierto estado de carga/deformación antes de la fisura de la probeta. Como se puede ver en la Figura 4 estos eventos se repitieron en ambos ensayos, aproximadamente a los 140 segundos en el ensayo de la probeta CIOp1 y a los 160 segundos en la probeta CIOp2, y no fueron replicados por el sensor LVDT en ninguno de los dos casos. Como se ve en ambos gráficos el sensor FBG experimenta una retracción brusca de la extensión acumulada hasta ese punto para luego continuar traccionándose con una sensibilidad [pm/µe] mayor a la característica previa a ese evento (la sensibilidad creció 2 pm/µe en la probeta CIOp1 y 3,5 pm/µe en la probeta CIOp2 aproximadamente). Un análisis de los datos obtenidos y del proceso del ensayo indicó que llegado determinado estado de deformación el sensor óptico perdió momentáneamente adherencia respecto del material de la probeta y luego continuó con el proceso de deformación. Las Figuras 5a y 5b presentan las curvas carga-deformación de las probetas CIOp1 y CIOp2, en ambas curvas se muestran las deformaciones específicas medidas con el sensor LVDT y las deformaciones medidas con el sensor FBG. Se observa que la curva del sensor FBG es similar a la del LVDT, pero desfasada. Se aprecia la pérdida de adherencia del sensor FBG, mencionada anteriormente, para cargas bajas (60kg en el caso de la probeta CIOp2 y cerca de 1000kg en la probeta CIOp1) y luego para una carga cercana a los 4000kg en ambas probetas el sensor parece perder adherencia nuevamente.
La pérdida de adherencia registrada se puede deber a ángulos vivos en las rugosidades del montaje del sensor óptico, realizadas para lograr adherencia, que provocaron la aparición de fisuras en la vecindad del mismo. La aparición de dichas fisuras por las mencionadas características del montaje puede ser bastante aleatoria en cuanto a la carga a la que suceda y a la ubicación a lo largo de la barra en que esto ocurra y tendrá mayor repercusión en la medición cuando suceden en la vecindad del tramo donde se encuentra la FBG. Esta conclusión obligó a un rediseño de los montajes de los sensores ópticos. De todas formas, los datos de estos ensayos fueron procesados para desafectar al sensor de dicho comportamiento anómalo tras lo cual se ve un comportamiento que replica al de los sensores LVDT con las siguientes limitaciones: no proveen datos fehacientes para deformaciones inferiores a los 30 µe ni luego de la fisuración, como se puede apreciar en los gráficos siguientes (Figura 6 y 7). Dicha desafectación se realizó sumando a la deformación registrada por el sensor óptico posterior al evento anómalo (posteriores a los 140 segundos para la probeta CIOp1 y 160 segundo para la probeta CIOp2) la magnitud de la retracción experimentada. Esto no implica que la precisión de los sensores no sea muy inferior a 30 µe. Asimismo, se pudo obtener un valor de sensibilidad del sensor 1,07 pm/µe, el cual se encuentra dentro del rango de sensibilidad de una FBG libre. Cabe aclarar que la sensibilidad debería ser un valor constante, o sea una recta de pendiente cero, independientemente del ruido de las mediciones, el ruido nos está induciendo errores en el cálculo y por lo tanto tiene cierta pendiente. Es importante destacar que la sensibilidad puede variar entre las FBGs y siendo que no se cuenta con las instalaciones ni equipamientos para medirla es imposible determinar la atenuación producida tanto en el conjunto FBG-montaje como en el conjunto sensor-probeta.
- Etapa 2
4.1 Rediseño de los sensores
El nuevo diseño de los sensores priorizó mejorar la adherencia del montaje al hormigón y evitar la atenuación provocada por la presencia de un cuerpo de adhesivo entre la FBG y el montaje, así como también agilizar y simplificar el proceso de armado de los sensores, sin descuidar la robustez de los mismos. Para lograr estos objetivos se utilizaron barras de hierro de construcción (típicamente AISI 1020) de 6 mm y 8 mm de sección, caladas superficialmente en su longitud para poder adherir la fibra óptica a la misma manteniendo el paralelismo con el eje de la barra en todo punto. La caladura se realizó de una profundidad de unos 2 mm con forma de V con una fresa de cuatro puntas, para autocentrar la fibra óptica en la misma. Ver Figura 8.

Una vez pegada con el adhesivo epoxi se la cubrió con un adhesivo a base de silicona para impedir que las tensiones producidas durante el fraguado del hormigón pudieran interferir con la FBG ya que, de otro modo, por tratarse de una colocación superficial con un adhesivo que no forma cuerpo, quedaría expuesta a las mismas. Dichas tensiones pueden deformar el pico de reflexión de la FBG y perjudicar la capacidad de detección de la misma. Se optó por una longitud de la barra de acero de 25 cm lo cual le provee al sensor suficiente superficie lateral para adherirse al hormigón sin interferir con la protección de las soldaduras de fibra óptica que en este caso se ubican fuera del montaje. Para evitar que la sección de la fibra entre el borde de la barra de acero y el protector de la soldadura de la fibra óptica sea muy débil se colocaron termocontraíbles de dos diámetros diferentes, quedando el más angosto pegado al propio montaje y el segundo, de mayor diámetro, sujetando al primero con el protector de soldadura.
4.2 Ensayos mecánicos de contrastación realizados con el nuevo diseño de montajes con sensores tradicionales
4.2.1 Ensayos de flexión con la FO embebida en el hormigón
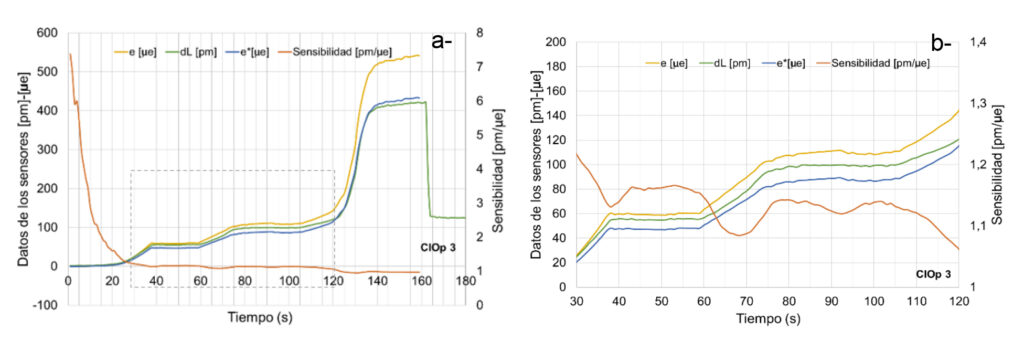
Se realizó un ensayo de iguales características a los del punto 3.2.2 utilizando los nuevos sensores. En la Figura 9 se pueden ver las curvas obtenidas, en las mismas se observa que el nuevo sensor FBG replicó la evolución de la deformación indicada por el LVDT. Este comportamiento se mantuvo hasta un determinado nivel de fisuración de la probeta, a partir del cual la sensibilidad del sensor FBG se redujo, posiblemente debido a un deslizamiento entre su montaje y el hormigón para luego mantenerse constante y de menor valor. Puede ser entonces que este comportamiento se produzca cuando aparece una fisura en el hormigón y podría ser utilizado para saber si un elemento se encuentra fisurado, aunque para ello deberían realizarse más ensayos para corroborarlo.
De este ensayo se pudo calcular una sensibilidad para el sensor en cuestión de 1,14 pm/µe. El valor es algo mayor al calculado para el diseño previo y es razonable teniendo en cuenta que en este la fibra se encuentra adherida solidariamente al montaje mientras que en el primer prototipo existe una interfaz de adhesivo entre la misma y el montaje de unos 2 mm.
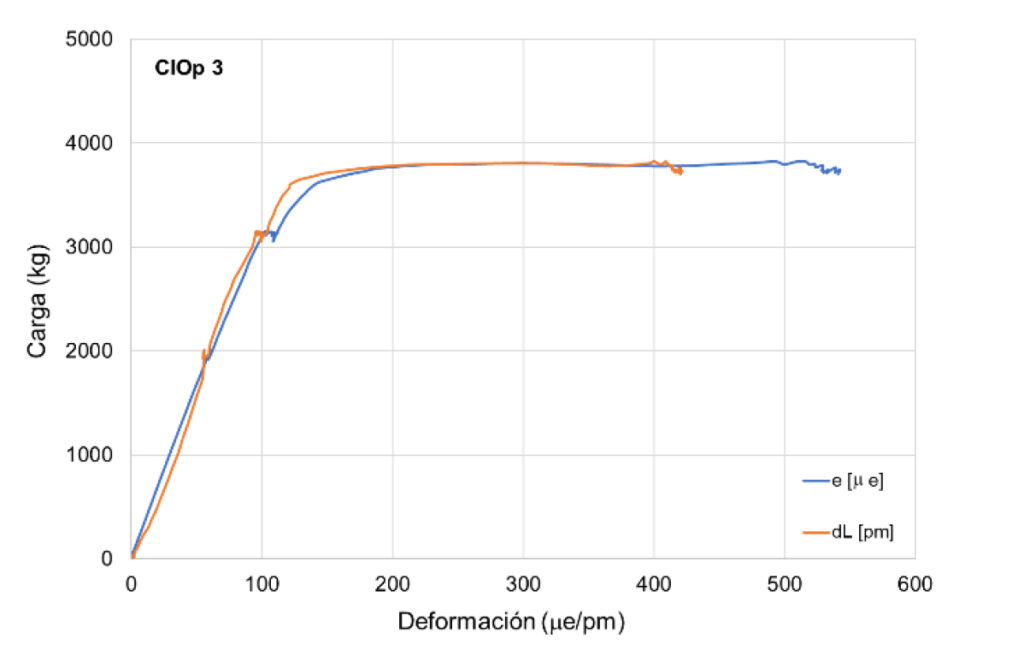
En la Figura 10 se presentan las curvas
carga-deformación medida con el LVDT (e) y medida con el sensor (dL) de la probeta CIOp3.
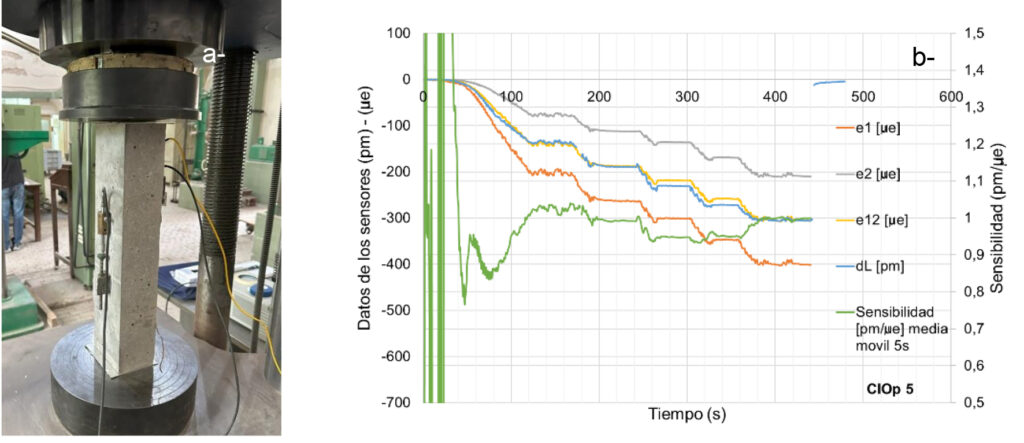
4.2.2 Ensayo de compresión
Finalmente se realizó un último ensayo sobre una probeta de hormigón a compresión simple. Un sensor de iguales características que los rediseñados se colocó en una probeta de 43 cm de longitud y sección igual a 7,5 cm x 10,5 cm. Las medidas de la probeta no son ideales para un ensayo a compresión dada su esbeltez, sin embargo, se optó por la misma ya que las previstas para los ensayos de compresión son cilíndricas y se llenan desde un extremo, dificultando la salida del cable del sensor. El sensor FBG se colocó en el centro geométrico de la sección transversal de la probeta y se colocaron dos sensores LVDT en las caras opuestas de mayor ancho (Figura 11a). En la Figura 11b se grafican las mediciones realizadas con los LVDT 1 y 2 (e1 y e2), el promedio de ambos y el sensor FBG (dL) en función del tiempo.
Como se observa en la Figura 11b los sensores LVDT1 (e1) y LVDT2 (e2) entregan respuestas diferentes, comprimiéndose el segundo menos que el primero. Asimismo, el sensor FBG muestra un comportamiento cercano al promedio de los dos LVDT. Es posible que las caras de las vigas presentaran alguna discontinuidad y no fueran paralelas con lo cual el apoyo de la máquina no sería parejo, induciendo flexión en la probeta. La sensibilidad media móvil 5 s, presentada en la Figura 11b, se calculó como promedio móvil del cálculo de la sensibilidad durante 5 s cuyo objetivo es eliminar fluctuaciones de alta frecuencia correspondientes al ruido en la medición de las variables utilizadas para calcularla (e12 y dL). La sensibilidad del sensor calculada a partir de la deformación promedio de los dos LVDT en el rango de tiempo de 200 s a 444 s se ubica en unos 0,97+/- 2 pm/µe, manteniéndose relativamente constante a lo largo del ensayo.
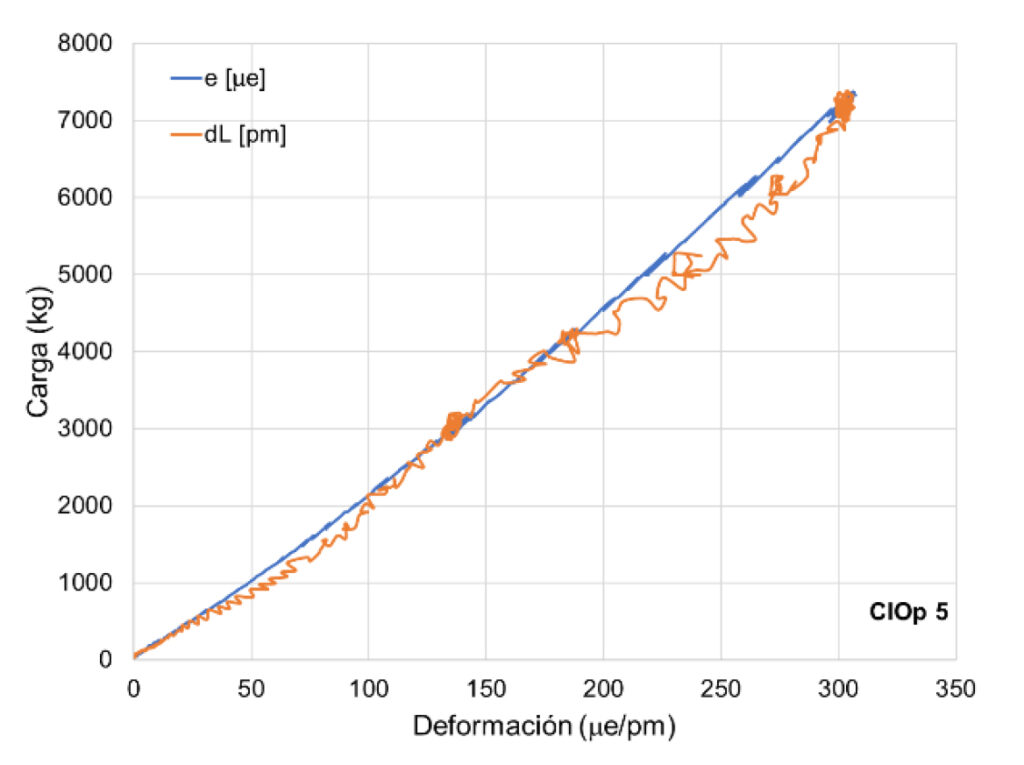
En la Figura 12 se grafican la deformación promedio de los dos LVDT y la deformación medida con el sensor FBG en función de la carga, se observa una excelente correlación entre los valores medidos con los distintos dispositivos, cabe aclarar que la carga aplicada y la deformación correspondiente son muy pequeñas, dentro del período elástico.
- Consideraciones finales
En este trabajo se muestran los estudios preliminares realizados para el diseño de un sensor de FO utilizado para medir deformaciones en una estructura de hormigón, se observó que:
– El diseño de montajes que presentó ángulos vivos en la rugosidad maquinada en forma de anillos concéntricos al eje del sensor, provocó una pérdida prematura de adherencia. Esto no sucedió al rediseñar el montaje donde se obtuvo una rugosidad superficial en forma de protuberancias superficiales de menor altura por sobre la superficie cilíndrica del mismo, sin ángulos vivos y con cierta inclinación respecto del plano perpendicular al eje del sensor.
– El ensayo de compresión permitió determinar la sensibilidad del sensor con mucha mayor precisión que los ensayos a flexión ya que en este último caso la deformación se produce indirectamente por la tracción de las fibras inferiores cuando se flexiona la barra existiendo cierta incertidumbre respecto de la ubicación real del sensor en relación a la cara inferior de la probeta donde se encontraba ubicado el sensor LVDT. Esta distancia influye en el cálculo de la sensibilidad ya que la deformación es proporcional a la distancia respecto del eje neutro de la barra. Asimismo, la presencia del propio sensor dentro de la probeta también puede influir en la ubicación del eje neutro.
Como consideración a futuro, debido a que la sensibilidad de los sensores depende en primer lugar de la sensibilidad de la FBG resulta imprescindible establecer la sensibilidad de cada sensor antes de que sea afectado al uso práctico; para ello sería ideal realizar ensayos de tracción de los sensores previo a ser colocados en estructuras a medir. Por otro lado, la calibración de los mismos puede ser realizada ya instalados en la propia estructura a partir de la solicitación de la misma con cargas conocidas, en puntos conocidos.
Fuentes de financiamiento
Este trabajo fue financiado por la ANP-FONCYT (PICT-2019-00010-Start-Up).
Contribución de autoría
D. Aredes y M.C. Torrijos: Conceptualización, Metodología, Investigación, Redacción-revisión-edición. E. Vaio: Investigación. M. Mineo: Investigación.
Declaración de conflicto de interés
Los autores declaran que no existen algún conflicto de interés.
Referencias
[1] Saouma, V. E., Anderson, D. Z., Ostrander, K., Lee, B., y Slowik, V. (1998). Application of fiber Bragg grating in local and remote infrastructure health monitoring. Materials and Structures, 31, 259–266. https://doi.org/c2425q
[2] Di Sante, R. (2015). Fibre optic sensors for structural health monitoring of aircraft composite structures: Recent advances and applications. Sensors, 15(8), 18666–18713. https://doi.org/gdj2n8
[3] Inaudi D., Glisic, B. (2008). Overview of fibre optic sensing applications to structural health monitoring. En FIG 13th Symposium on Deformation Measurement and Analysis and IAG 4th Symposium on Geodesy for Geotechnical and Structural Engineering (pp. 1–10). LNEC.
[4] Herbers, M., Richter, B., Gebauer, D., Classen, M., y Marx, S. (2023). Crack monitoring on concrete structures: Comparison of various distributed fiber optic sensors with digital image correlation method. Structural Concrete, 24(5), 6123–6140. https://doi.org/qps5
[5] Rao, Y.-J. (1997). In-fibre Bragg grating sensors. Measurement Science and Technology, 8(4), 355–375. https://doi.org/ffqnhq
[6] Kersey, A. D., Davis, M. A., Patrick, H. J., LeBlanc, M., Koo, K. P., Askins, C. G., Putnam, M. A., y Friebele, E. J. (1997). Fiber grating sensors. Journal of Lightwave Technology, 15(8), 1442–1463. https://doi.org/dpms6x
[7] Haase, K. (2007). Strain sensors based on Bragg gratings. En IMEKO (Ed.), 20th IMEKO TC3 International Conference on Measurement of Force, Mass and Torque 2007 (pp. 1–8). Curran Associates, Inc.
[8] Yu, Y., Tam, H., Chung, W., y Demokan, M. S. (2000). Fiber Bragg grating sensor for simultaneous measurement of displacement and temperature. Optics Letters, 25(16), 1141–1143. https://doi.org/d5bbt5
Este es un artículo de acceso abierto distribuido bajo los términos de la licencia Creative Commons Atribución-NoComercial-CompartirIgual 4.0 Internacional (CC-BY-NC-SA 4.0).
Citar como: Aredes, D., Torrijos, M. C., Vaio, E., y Mineo, M. (2026). Desarrollo de un prototipo de sensor de fibra óptica para medir deformaciones en hormigón. Revista Hormigón, 69, 26–38. https://id.caicyt.gov.ar/ark:/s27189058/1p9kcuk6g